Thiết bị theo dõi mặt trời
Như bạn đã biết, hiệu quả của một tấm pin mặt trời được phát huy tối đa khi nó tiếp xúc với ánh sáng mặt trời trực tiếp. Nhưng kể từ Vì mặt trời liên tục di chuyển dọc theo đường chân trời, hiệu quả của các tấm pin mặt trời giảm đáng kể khi các tia mặt trời rơi xuống bảng điều khiển ở một góc. Để tăng hiệu quả của các tấm pin mặt trời, các hệ thống theo dõi mặt trời và tự động xoay bảng mặt trời thành bức xạ trực tiếp được sử dụng.
Bài viết này trình bày sơ đồ của một thiết bị để theo dõi mặt trời hoặc một bộ theo dõi khác (Solar Tracker).
Bài viết này trình bày sơ đồ của một thiết bị để theo dõi mặt trời hoặc một bộ theo dõi khác (Solar Tracker).
Mạch theo dõi rất đơn giản, nhỏ gọn và bạn có thể dễ dàng lắp ráp nó bằng tay của chính mình. Để xác định vị trí của mặt trời, hai chất quang dẫn được sử dụng. Động cơ được bật theo mạch cầu H, cho phép chuyển đổi dòng điện lên đến 500 mA với điện áp cung cấp 6-15V. Trong bóng tối, thiết bị cũng có chức năng và sẽ biến động cơ thành nguồn sáng mạnh nhất.
Sơ đồ của một thiết bị để theo dõi mặt trời
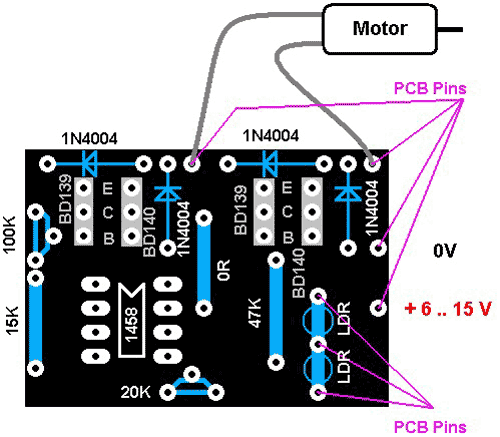
Như bạn có thể thấy trong hình bên dưới, mạch rất đơn giản để làm ô nhục và chứa chip khuếch đại hoạt động LM1458 (K140UD20), bóng bán dẫn BD139 (KT815G, KT961A) và BD140 (KT814G, KT626V), điện trở quang
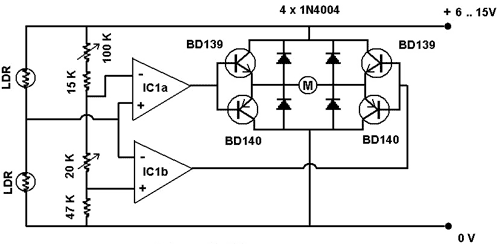
Có thể thấy từ sơ đồ rằng động cơ M được đặt chuyển động ở các giá trị khác nhau ở đầu ra của op-amp IC1a và IC1b. Bảng chân lý:
| Đầu ra IC1a | Đầu ra IC1b | Tình trạng động cơ |
| Thấp | Thấp |
Ngừng
|
| Thấp | Cao | Chuyển tiếp * |
| Cao | Cao | Ngừng |
| Cao | Thấp | Quay lại * |
* hoặc ngược lại, phụ thuộc vào kết nối của động cơ
Các bóng bán dẫn trong mạch hoạt động theo cặp, theo đường chéo, chuyển đổi + Ve hoặc -Ve sang động cơ và buộc nó phải quay về phía trước hoặc lùi.
Khi động cơ dừng lại, nó tiếp tục quay, như Có một khoảnh khắc quay. Do đó, động cơ trong một thời gian sẽ tạo ra năng lượng, có thể vô hiệu hóa các bóng bán dẫn. Để bảo vệ bóng bán dẫn khỏi bộ đếm EMF, 4 điốt được sử dụng trong mạch cầu.
Giai đoạn đầu vào bao gồm hai bộ phát quang op-amps (IC1) và LDR và LDR. Nếu lượng ánh sáng chiếu vào chúng là như nhau, thì điện trở của các chất quang dẫn cũng bằng nhau. Do đó, nếu điện áp cung cấp là 12 V, thì tại điểm nối của bộ phát quang LDR LDR sẽ có điện áp 6V. Nếu lượng sự cố ánh sáng trên một quang điện trở lớn hơn trên một quang điện trở khác, thì điện áp sẽ thay đổi.
Các giới hạn (giới hạn) từ + V đến 0V được đặt bởi bốn điện trở được nối tiếp và được điều chỉnh bởi 2 điện trở điều chỉnh. Nếu điện áp vượt quá các giới hạn này, thì op-amp sẽ khởi động động cơ và nó sẽ liên tục quay.
Một điện trở điều chỉnh 20K kiểm soát độ nhạy, tức là phạm vi giữa các giới hạn. Tông đơ 100K kiểm soát mức độ đối xứng của các giới hạn đối với + V / 2 (điểm cân bằng).
Một điện trở điều chỉnh 20K kiểm soát độ nhạy, tức là phạm vi giữa các giới hạn. Tông đơ 100K kiểm soát mức độ đối xứng của các giới hạn đối với + V / 2 (điểm cân bằng).
Cài đặt mạch:
1. Kiểm tra điện áp của mạch cấp nguồn
2. Kết nối trụ động cơ. Hiện tại
3. Cài đặt cản quang bên cạnh chúng giảm cùng một lượng ánh sáng.
4. Rút cả hai điện trở cắt hoàn toàn ngược chiều kim đồng hồ
5. Cấp nguồn cho mạch. Quay mô tơ
6. Xoay tông đơ 100K theo chiều kim đồng hồ cho đến khi dừng lại. Đánh dấu mục này.
7. Tiếp tục xoay tông đơ 100K theo chiều kim đồng hồ cho đến khi động cơ bắt đầu quay theo hướng ngược lại. Đánh dấu mục này.
8. Chia góc giữa hai vị trí thành một nửa và đặt tông đơ ở đó (đây sẽ là điểm cân bằng).
9. Bây giờ, xoay tông đơ 20K theo chiều kim đồng hồ cho đến khi động cơ bắt đầu giật
10. Hơi đặt vị trí của tông đơ trở lại (ngược chiều kim đồng hồ) để dừng động cơ (tông đơ này chịu trách nhiệm về độ nhạy)
11. Thay vào đó, hãy kiểm tra hoạt động chính xác của mạch chặn một và các chất phát quang thứ hai từ ánh sáng.
1. Kiểm tra điện áp của mạch cấp nguồn
2. Kết nối trụ động cơ. Hiện tại
3. Cài đặt cản quang bên cạnh chúng giảm cùng một lượng ánh sáng.
4. Rút cả hai điện trở cắt hoàn toàn ngược chiều kim đồng hồ
5. Cấp nguồn cho mạch. Quay mô tơ
6. Xoay tông đơ 100K theo chiều kim đồng hồ cho đến khi dừng lại. Đánh dấu mục này.
7. Tiếp tục xoay tông đơ 100K theo chiều kim đồng hồ cho đến khi động cơ bắt đầu quay theo hướng ngược lại. Đánh dấu mục này.
8. Chia góc giữa hai vị trí thành một nửa và đặt tông đơ ở đó (đây sẽ là điểm cân bằng).
9. Bây giờ, xoay tông đơ 20K theo chiều kim đồng hồ cho đến khi động cơ bắt đầu giật
10. Hơi đặt vị trí của tông đơ trở lại (ngược chiều kim đồng hồ) để dừng động cơ (tông đơ này chịu trách nhiệm về độ nhạy)
11. Thay vào đó, hãy kiểm tra hoạt động chính xác của mạch chặn một và các chất phát quang thứ hai từ ánh sáng.
Danh sách các yếu tố vô tuyến
| Chỉ định | Loại | Mệnh giá | Số lượng | Lưu ý | Cửa hàng |
|---|---|---|---|---|---|
| Bộ khuếch đại hoạt động |
LM1458
| 1 | Tương tự: K140UD20 | Tìm kiếm nguồn | |
| Transitor lưỡng cực |
Bd139
| 2 | Tương tự: KT815G, KT961A | Tìm kiếm nguồn | |
| Transitor lưỡng cực |
Bd140
| 2 | Chất tương tự: KT814G, KT626V | Tìm kiếm nguồn | |
| Diode chỉnh lưu |
1N4004
| 4 | Tương tự: KD243G | Tìm kiếm nguồn | |
| Điện trở | 15 giờ | 1 | Tìm kiếm nguồn | ||
| Điện trở | 47 kOhm | 1 | Tìm kiếm nguồn | ||
| Điện trở tông đơ | 100 kOhm | 1 | Tìm kiếm nguồn | ||
| Điện trở tông đơ | 20 giờ | 1 | Tìm kiếm nguồn | ||
| Máy quang điện | 2 | Tìm kiếm nguồn |
Tệp đính kèm:
- tracker.lay (22 Kb)


Nhận xét
Đăng nhận xét